

Come l’ampiezza del segnale di ritorno può influenzare la misura della distanza nei sistemi a tempo di volo.
I sistemi LiDAR sono ormai strumenti centrali per rilievi topografici, mobile mapping, robotica, monitoraggio infrastrutturale, guida autonoma, beni culturali e costruzione di digital twin. La loro capacità di generare nuvole di punti dense e metricamente affidabili dipende però da una catena di misura complessa, nella quale non conta soltanto la qualità dell’ottica o della meccanica dello scanner, ma anche il comportamento dell’elettronica interna.
Uno degli errori più interessanti, e spesso meno intuitivi, è il cosiddetto range walk: un errore sistematico di distanza dovuto alla diversa ampiezza del segnale laser di ritorno. In altre parole, due impulsi riflessi da oggetti posti alla stessa distanza possono essere rilevati in istanti leggermente diversi se hanno intensità differenti. Questo può produrre una misura di distanza non perfettamente corretta e, di conseguenza, piccoli errori nella nuvola di punti.
Il principio del cosiddetto tempo di volo
Nei sistemi LiDAR a "tempo di volo", la distanza viene calcolata misurando l’intervallo tra l’emissione di un impulso laser e il ritorno dell’eco riflessa dal bersaglio. Il principio è semplice: conoscendo la velocità della luce e il tempo impiegato dall’impulso per andare e tornare, il sistema ricava la distanza dell’oggetto.
Nella pratica, però, il LiDAR non misura direttamente il “centro” fisico dell’impulso laser. Il segnale ottico di ritorno viene convertito in un segnale elettrico da un fotodiodo, amplificato e poi confrontato con una soglia di rilevamento. Quando il fronte crescente del segnale supera questa soglia, l’elettronica registra l’arrivo dell’impulso.
È proprio in questo passaggio che può nascere l’errore. Se due segnali hanno la stessa forma ma ampiezza diversa, quello più intenso supera la soglia prima di quello più debole. Il sistema può quindi attribuire ai due ritorni tempi di arrivo diversi, anche se fisicamente provengono da bersagli alla stessa distanza.
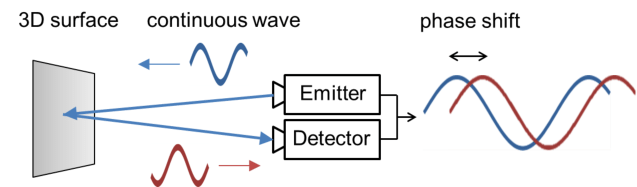 Principio di funzionamento di un LiDAR a tempo di volo: il sistema calcola la distanza misurando il tempo tra emissione dell’impulso laser e ricezione dell’eco riflessa.
Principio di funzionamento di un LiDAR a tempo di volo: il sistema calcola la distanza misurando il tempo tra emissione dell’impulso laser e ricezione dell’eco riflessa.
Che cos’è il range walk
Il range walk è un errore sistematico legato all’ampiezza del segnale di ritorno. Non è un semplice rumore casuale, ma una deviazione prevedibile: al variare dell’intensità dell’eco, varia anche il momento in cui il segnale attraversa la soglia impostata dal ricevitore.
Questo fenomeno è particolarmente importante perché l’ampiezza del segnale LiDAR cambia continuamente in funzione di diversi fattori:
- distanza del bersaglio;
- riflettanza del materiale;
- dimensione e orientamento dell’oggetto;
- divergenza del fascio laser;
- condizioni atmosferiche;
- capacità del ricevitore di gestire segnali molto deboli o molto forti.
Una superficie chiara e riflettente, una superficie scura, un cartello stradale, una lamiera metallica o un oggetto molto distante possono quindi restituire segnali con ampiezze molto diverse. Se il sistema usa una soglia fissa per rilevare l’arrivo dell’impulso, questa variazione può trasformarsi in un errore di distanza.
Errori casuali ed errori correggibili
È utile distinguere tra errori casuali ed errori sistematici, una delle basi per la valutazione dei risultati nella topografia. Gli errori casuali, come il jitter temporale generato dal rumore elettronico del fotodiodo e dell’amplificatore, sono i più temibili, causano dispersione nelle misure. Sono legati a fluttuazioni non prevedibili e non possono essere eliminati completamente con una semplice calibrazione.
Gli errori sistematici, invece, seguono una relazione più stabile. Il range walk appartiene a questa seconda categoria: dipende dall’ampiezza del segnale e può essere corretto se si conosce la relazione tra intensità del ritorno e spostamento temporale introdotto dalla soglia di rilevamento.
Per la qualità delle nuvole di punti questa distinzione è fondamentale. Il rumore casuale incide sulla precisione, cioè sulla ripetibilità delle misure; il range walk incide sull’accuratezza, cioè sulla vicinanza della misura al valore reale. Un sistema LiDAR deve quindi ridurre il rumore, ma anche calibrare gli errori sistematici.
Il problema della saturazione elettronica
Nei casi reali, la difficoltà principale è che il segnale di ritorno può variare su un intervallo molto ampio. Un LiDAR deve essere abbastanza sensibile da rilevare ritorni deboli provenienti da bersagli lontani, ma allo stesso tempo deve gestire segnali molto forti provenienti da oggetti vicini o altamente riflettenti.
Per ottenere sensibilità sui segnali deboli, il ricevitore utilizza amplificatori ad alto guadagno. Tuttavia, quando arriva un segnale molto forte, l’amplificatore può saturarsi: il segnale elettrico non cresce più proporzionalmente all’intensità reale dell’eco. In queste condizioni, misurare direttamente l’ampiezza del segnale diventa difficile.
La saturazione non significa necessariamente perdita completa del dato, ma introduce una complicazione importante. Se l’ampiezza reale non è più leggibile in modo lineare, il sistema deve trovare un altro indicatore per stimare l’intensità dell’eco e correggere l’errore di distanza.
Time Over Threshold: misurare quanto dura il segnale sopra soglia
Una soluzione proposta da Allegro MicroSystems è l’uso del Time Over Threshold, spesso abbreviato in TOT. Invece di misurare direttamente l’ampiezza massima del segnale, il sistema misura per quanto tempo il segnale resta sopra la soglia di rilevamento.
Il principio è relativamente semplice: un impulso più debole attraversa la soglia per un tempo più breve, mentre un impulso più forte tende a restare sopra soglia più a lungo. Anche quando l’amplificatore è in saturazione, la larghezza temporale dell’impulso può mantenere una relazione monotona con l’ampiezza del segnale.
Il TOT diventa quindi una sorta di indicatore indiretto dell’intensità del ritorno. Attraverso una calibrazione empirica, il sistema può associare a ciascun valore di TOT una correzione temporale, e quindi una correzione di distanza.
Dalla calibrazione alla correzione della misura
La correzione può essere applicata tramite una tabella di calibrazione o tramite una funzione polinomiale. In entrambi i casi, il principio è lo stesso: si misura il comportamento del sistema in condizioni note, si ricava la relazione tra Time Over Threshold (TOT) ed errore di distanza, e poi si applica la correzione alle misure operative.
Questo approccio è particolarmente interessante perché non richiede necessariamente di misurare l’ampiezza assoluta dell’eco su tutto l’intervallo dinamico del ricevitore. Il sistema usa invece una grandezza temporale, più facilmente gestibile dall’elettronica digitale: la durata dell’impulso sopra soglia.
Nel documento tecnico di Allegro MicroSystems, la correzione basata su TOT viene presentata come un metodo efficace per ridurre l’errore sistematico di range walk in un sistema LiDAR a tempo di volo basato su APD, cioè su un fotodiodo APD – Avalanche Photodiode, un sensore ottico molto sensibile usato per rilevare segnali laser deboli.
Perché questo tema interessa la geomatica
Per chi lavora con rilievi LiDAR, laser scanner terrestri, mobile mapping o UAV, il range walk può sembrare un dettaglio interno allo strumento. In realtà ha conseguenze dirette sulla qualità della nuvola di punti.
Gli effetti possono manifestarsi in diversi modi:
- superfici molto riflettenti leggermente spostate;
- differenze apparenti tra materiali chiari e scuri;
- punti anomali su cartelli, catarifrangenti o metalli;
- perdita di accuratezza su oggetti a distanza variabile;
- incoerenze tra passate o acquisizioni effettuate con geometrie diverse.
Naturalmente, nella maggior parte degli strumenti commerciali molte correzioni vengono già implementate dal costruttore. Tuttavia, conoscere questi fenomeni aiuta a interpretare meglio il dato, soprattutto quando si devono validare rilievi ad alta precisione, confrontare dataset diversi o analizzare anomalie nella nuvola di punti.
Oltre la densità: la qualità metrica del dato LiDAR
Nel linguaggio comune, la qualità di un rilievo LiDAR viene spesso associata alla densità dei punti, alla portata dello strumento o alla velocità di acquisizione. Questi parametri sono importanti, ma non esauriscono il tema. Una nuvola di punti densa non è automaticamente una nuvola accurata.
La qualità metrica dipende dalla capacità dello strumento di misurare correttamente il tempo di volo, compensare gli errori sistematici, gestire l’ampio intervallo di intensità dei segnali di ritorno e mantenere stabile la risposta elettronica del ricevitore. In questo senso, il LiDAR non è soltanto un sistema ottico, ma una piattaforma integrata in cui fotonica, elettronica, temporizzazione e algoritmi di calibrazione lavorano insieme.
Il caso del range walk mostra bene questa complessità. Un errore che nasce nel punto di attraversamento di una soglia elettronica può propagarsi fino alla distanza misurata e, infine, alla geometria della nuvola di punti. La correzione, a sua volta, richiede una conoscenza dettagliata del comportamento del ricevitore e una calibrazione adeguata.
Conclusioni
Il LiDAR è una tecnologia estremamente potente, ma la sua affidabilità non va data per scontata. Dietro ogni punto di una nuvola ci sono un impulso laser, un segnale di ritorno, un ricevitore elettronico, una soglia di rilevamento, un tempo misurato e una catena di correzioni.
Il range walk è un esempio concreto di errore sistematico che può influenzare la misura della distanza nei sistemi a tempo di volo. La sua origine è legata alla diversa ampiezza del segnale di ritorno e al modo in cui l’elettronica rileva l’arrivo dell’impulso. A differenza del rumore casuale, però, questo errore può essere modellato e corretto.
L’uso del Time Over Threshold rappresenta una strategia efficace per stimare indirettamente l’ampiezza del segnale e applicare correzioni calibrate, anche in presenza di saturazione del ricevitore.
Per la geomatica, il messaggio è chiaro: la qualità di una nuvola di punti non dipende solo dallo scanner o dal software di elaborazione, ma anche dalla fisica e dall’elettronica della misura.
Comprendere questi aspetti permette di leggere il dato LiDAR con maggiore consapevolezza, riconoscere possibili anomalie e valutare meglio l’affidabilità metrica dei rilievi nei diversi ambiti applicativi.
Fonte tecnica principale:
Allegro MicroSystems, “Range-Walk Correction Using Time Over Threshold”, technical document, 19 agosto 2021.
