

Negli ultimi anni, la fusione tra dati GNSS e sensori inerziali (IMU) è diventata un tema centrale nel campo del posizionamento satellitare avanzato.
Questa integrazione, inizialmente sviluppata in ambito aeronautico e robotico, è oggi ampiamente utilizzata in applicazioni terrestri, mobili e consumer, incluse quelle basate su ricevitori GNSS low-cost e smartphone.
Spesso, però, la fusione GNSS/IMU viene presentata come una soluzione “miracolosa”, capace di risolvere automaticamente i limiti del GNSS in ambienti complessi. In realtà, il contributo reale dell’IMU dipende fortemente dalla qualità del sensore, dall’architettura algoritmica e dal contesto applicativo. In questo articolo analizziamo cosa può realmente offrire la fusione GNSS/IMU, quali sono i suoi limiti pratici e in quali scenari rappresenta un valore aggiunto concreto.
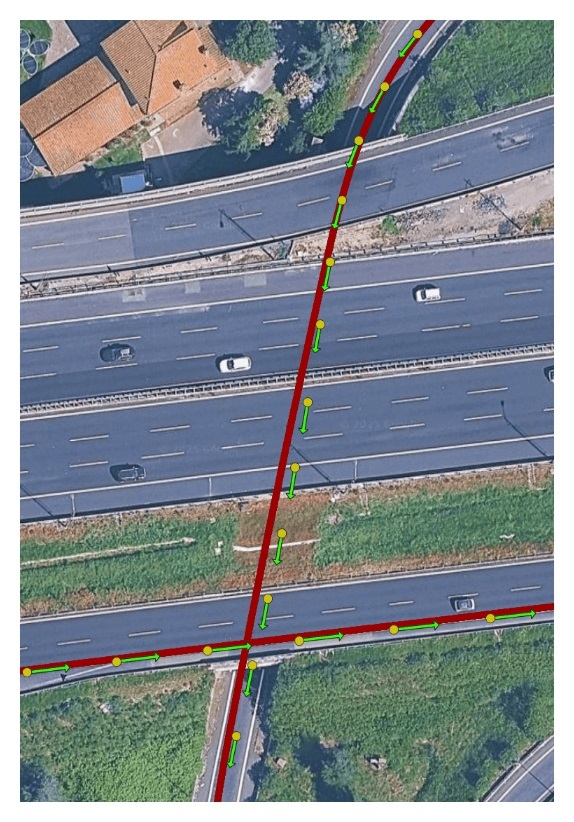
Fusione GNSS/IMU sotto un ponte. In rosso la
traiettoria ground truth e in giallo le posizioni calcolate.
Il GNSS da solo: precisione elevata ma continuità limitata
Il GNSS è in grado di fornire posizioni assolute riferite a un sistema di riferimento globale, con precisioni che vanno da alcuni metri fino al centimetro, a seconda della tecnica utilizzata (SPP, PPP, RTK). Tuttavia, il GNSS presenta alcune debolezze strutturali:
- forte dipendenza dalla visibilità dei satelliti
- sensibilità a multipath, interferenze e ambienti ostruiti
- degrado delle prestazioni in ambito urbano, sotto vegetazione o in galleria
- instabilità temporanea in presenza di perdite di segnale
In contesti dinamici, come la navigazione veicolare o il tracciamento pedonale, anche brevi interruzioni del segnale GNSS possono compromettere la continuità della traiettoria stimata.
I sensori inerziali: punti di forza e debolezze
I sensori inerziali, tipicamente accelerometri e giroscopi triassiali, misurano accelerazioni e velocità angolari del corpo su cui sono installati. Integrando queste misure nel tempo, è possibile stimare variazioni di velocità, orientamento e posizione.
I principali vantaggi dell’IMU sono:
- elevata frequenza di aggiornamento (decine o centinaia di Hz)
- indipendenza da segnali esterni
- continuità delle misure anche in ambienti chiusi
Tuttavia, le IMU soffrono di un problema fondamentale: l’errore cresce rapidamente nel tempo. Bias, rumore e deriva, se non corretti, portano a errori di posizione che aumentano quadraticamente nel tempo. Questo rende l’IMU inutilizzabile come sistema di navigazione autonomo per periodi prolungati, soprattutto nel caso di sensori low-cost o integrati negli smartphone.
Il principio della fusione GNSS/IMU
La fusione GNSS/IMU nasce proprio per combinare i punti di forza dei due sistemi:
- il GNSS fornisce una posizione assoluta, stabile nel lungo periodo
- l’IMU garantisce continuità e dinamica nel breve periodo
In un sistema fuso, il GNSS viene utilizzato per correggere periodicamente la deriva dell’IMU, mentre l’IMU consente di interpolare la traiettoria tra due epoche GNSS e di mantenere una stima affidabile durante brevi blackout del segnale satellitare.
Dal punto di vista algoritmico, questa fusione può essere implementata tramite filtri di Kalman (EKF) o approcci di ottimizzazione su grafi fattoriali (FGO).
Cosa apporta realmente l’IMU nella pratica
Miglioramento della continuità
Il contributo più evidente dell’IMU è il miglioramento della continuità della soluzione. In presenza di brevi interruzioni GNSS (ad esempio sotto un ponte o in un canyon urbano), l’IMU permette di propagare lo stato del sistema mantenendo una traiettoria coerente, evitando salti improvvisi di posizione.
Migliore stima della dinamica
Le osservazioni inerziali forniscono informazioni dirette sulla dinamica del movimento. Questo è particolarmente utile in applicazioni cinematiche, dove il GNSS da solo fatica a descrivere correttamente accelerazioni e variazioni rapide di velocità, specialmente quando le osservazioni sono rumorose.
Supporto al rilevamento di anomalie GNSS
Un sistema GNSS/IMU consente anche di individuare più facilmente osservazioni GNSS anomale. Se la posizione stimata dal GNSS è incompatibile con la dinamica prevista dall’IMU, l’osservazione può essere pesata meno o esclusa, aumentando la robustezza complessiva del sistema.
Cosa l’IMU non può fare
È importante chiarire anche cosa l’IMU non può fare, soprattutto nel contesto di sensori consumer:
- non può sostituire il GNSS per lunghi periodi
- non elimina gli errori sistematici del GNSS
- non garantisce precisione assoluta senza vincoli esterni
- non compensa una cattiva qualità delle osservazioni GNSS
In particolare le IMU low-cost integrate nei dispositive massivi presentano bias elevati e instabili, che limitano fortemente la durata utile della propagazione inerziale pura. In questi casi, l’IMU agisce più come un “regolarizzatore” della soluzione che come una vera fonte di navigazione autonoma.
La fusione GNSS/IMU rappresenta uno strumento potente. Il suo reale valore emerge quando viene utilizzata con consapevolezza, comprendendo i limiti dei sensori inerziali e le caratteristiche del contesto applicativo.
L’IMU non è una soluzione a tutti i limiti del GNSS, ma un complemento fondamentale per migliorare continuità, robustezza e qualità dinamica della soluzione. In particolare, con ricevitori low-cost e smartphone, la fusione GNSS/IMU consente di ottenere risultati più affidabili, a patto di adottare modelli realistici e architetture algoritmiche adeguate.
Con l’evoluzione dei sensori e degli algoritmi di fusione, è verosimile che l’integrazione GNSS/IMU diventi sempre più centrale nelle applicazioni di posizionamento del futuro, soprattutto in ambienti complessi dove il GNSS da solo non è sufficiente.
